Uw reis naar CNC-Automatisering begint hier

CNC-machines automatiseren, dat is wat we doen bij RoboJob. Al sinds 2007 zetten we de standaard met gebruiksvriendelijke, kant-en-klare automatiseringsoplossingen die ontworpen zijn om de efficiëntie en flexibiliteit in de productie te verhogen.
Met meer dan 2.000 geïnstalleerde robots wereldwijd is onze expertise ongeëvenaard.
Onze missie gaat verder dan automatisering. We willen productie aantrekkelijker maken voor de volgende generatie, want zonder mensen is er geen industrie. Door repetitieve taken te automatiseren, kunnen operatoren hun tijd weer spenderen aan waar ze echt het verschil maken, en kunnen de geautomatiseerde CNC-machines hun spindeluren maximaliseren. Zo blijven ze winstgevend - en wordt onze industrie weer veerkrachtig.
Waarom automatiseren?
-


Waarom automatiseren?
Meer
spindeluren
-


Waarom automatiseren?
jonge werknemers
weer aantrekken
-


Waarom automatiseren?
Reageer snel
op een spoedopdracht
-


Waarom automatiseren?
Ontlast uw operators
van zware werkstukken
-


Waarom automatiseren?
Iedereen
doet het
-

Waarom automatiseren?
Terugverdiend
binnen de garantieperiode
Deze principes liggen aan de basis van RoboJob, en het is opmerkelijk dat ze vandaag nog even relevant zijn als 18 jaar geleden. Als marktleider zijn we er voor de hele sector: of u nu op de hoogte bent van deze redenen om te automatiseren, of dat dit de eerste keer is dat u ze leest. Welkom!
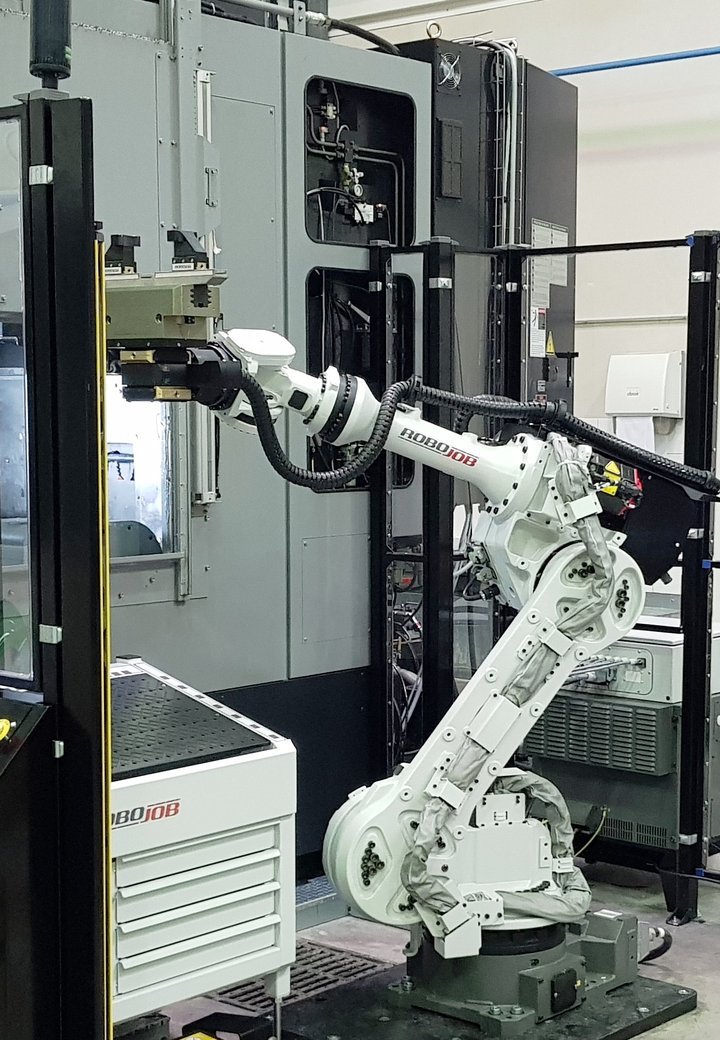
Hoe automatiseren we?
CNC-machines bedienen, dat is wat we doen. Onze robotoplossingen laden ruwe onderdelen in CNC-machines en ontladen de afgewerkte stukken zodra de batch klaar is. Heeft uw productieproces ook een helpende hand nodig tijdens de batchcyclus? Onze robots openen de deur en helpen een handje.
De bediening van onze robots is intuïtief, waardoor het snel en eenvoudig is. Het is onze missie om elke CNC-operator binnen een paar minuten aan de slag te laten gaan met onze software. Het instellen van een nieuwe batch in onze software is kinderspel, waardoor snelle omschakelingen en meer spindeluren mogelijk zijn.
Onze RoboJob-systemen zijn zeer toegankelijk dankzij hun intuïtieve en gebruiksvriendelijke software-interface. Operators van alle ervaringsniveaus kunnen de robot snel beheren en bedienen met minimale training. De duidelijke instructies op het scherm maken automatisering eenvoudiger en toegankelijker dan ooit.

Een van de belangrijkste kenmerken van onze robots is dat ze CNC-merkonafhankelijk zijn. Onze robots werken met elk CNC-merk. In een wereld vol exclusiviteit bieden wij universatiliteit. Daardoor kun je de robot voor verschillende CNC-machines gebruiken.
Bij RoboJob automatiseren we het productieproces voor verschillende soorten werkstukken, variërend in vorm, grootte en materialen, of ze nu complex of eenvoudig zijn. Dat doen we met aanpasbare grijpers en onze intelligente software.

Zowel nieuwe als bestaande machines kunnen geautomatiseerd worden. RoboJob helpt u bij het uitrusten van uw machine met een automatische deur, de juiste opspanningen en een robotinterface.


Terugverdiend in ...
Vraag een gratis ROI-berekening aan
En kruis alvast de dag in uw kalender aan waarop u geld begint te verdienen met uw investering.
Onze robots, uw oplossing
-
Turn-Assist
Een slim, flexibel systeem dat het laden en ontladen van CNC-draaibanken stroomlijnt.
-

Mill-Assist
Een compacte, veelzijdige oplossing die het laden van CNC-freesmachines automatiseert met snelheid en precisie.
-

Coby CNC
De compacte, veilige collega die ervoor zorgt dat uw eerste stap in CNC automatisering voelt als kinderspel.
-
Pallet-Load
Een betrouwbare automatiseringsoplossing voor het efficiënt laden en ontladen van CNC-machines van en naar een pallet.
-
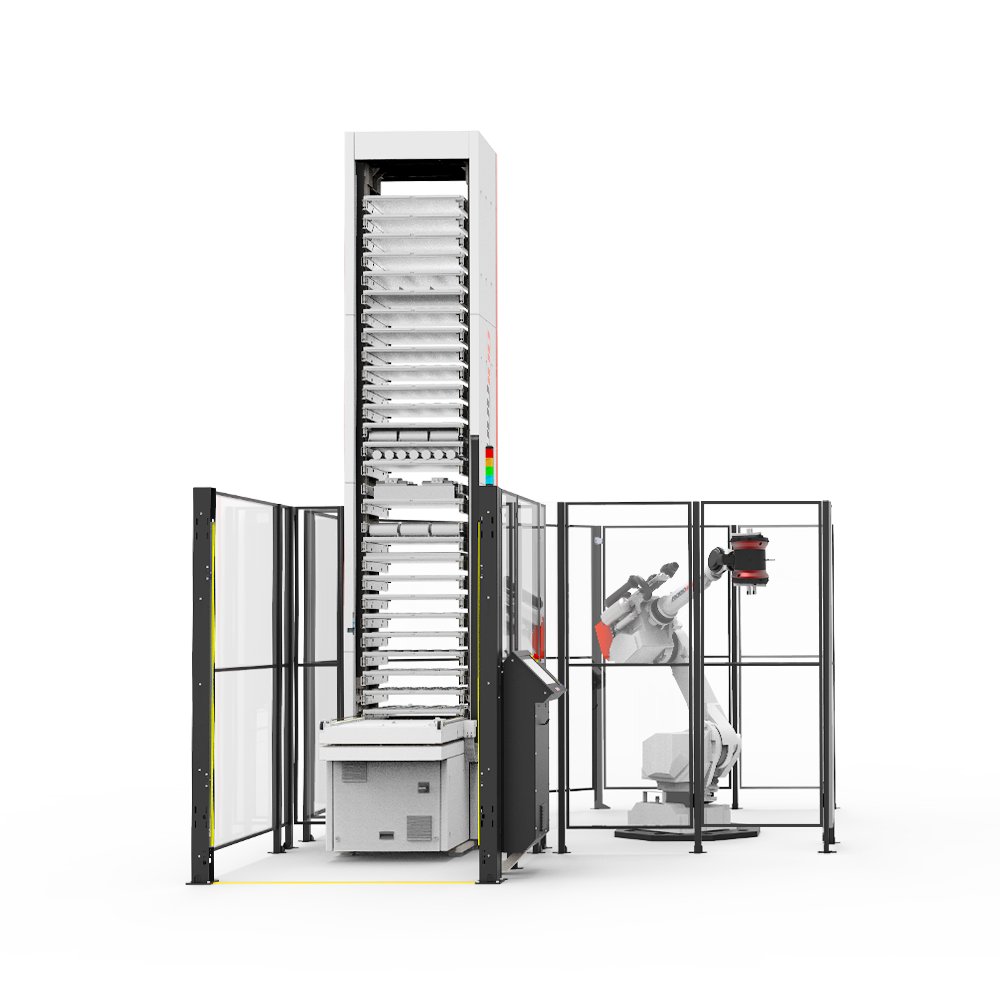
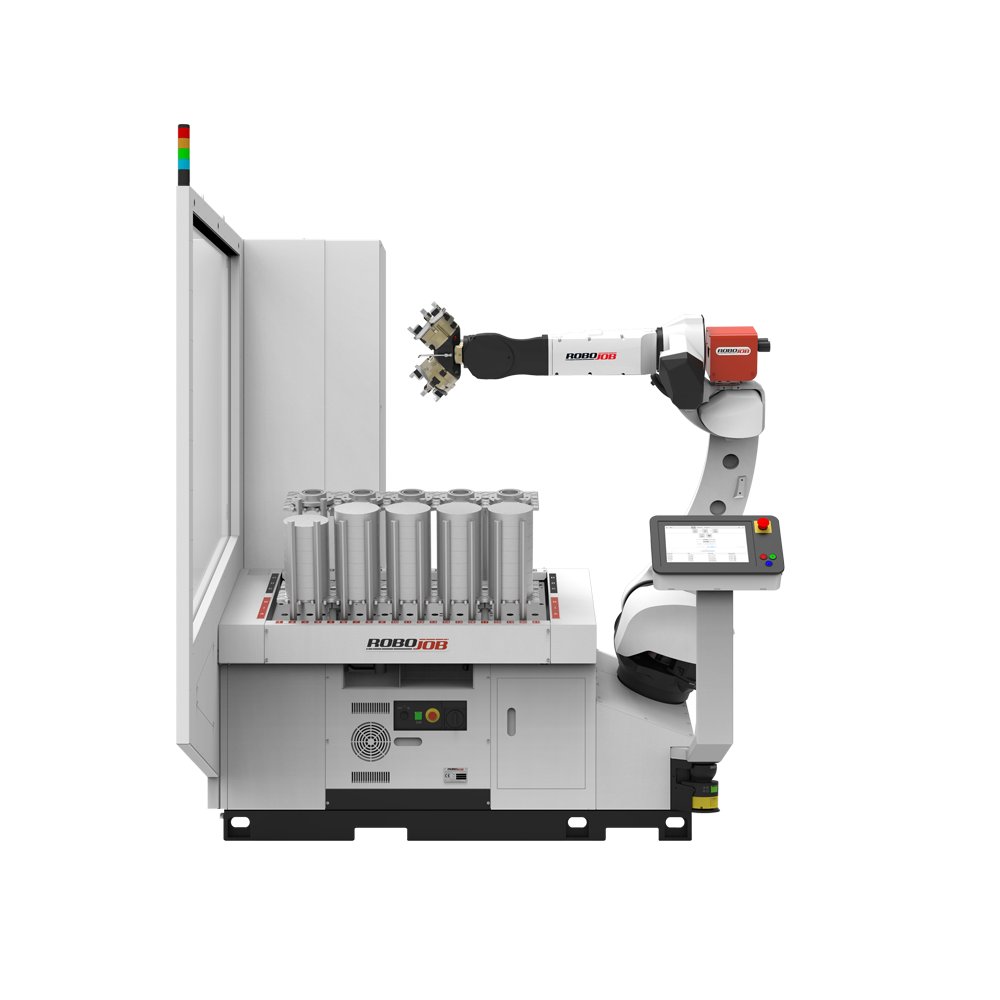
Tower
Uw multitasking tovenaar voor High Mix, Low Volume - verwisselt opspanningen, bekken, spantangen en werkstukken sneller dan je 'automatiseringsgenie' kunt zeggen.
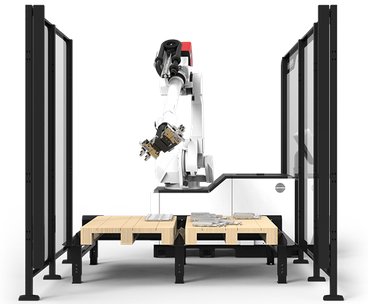
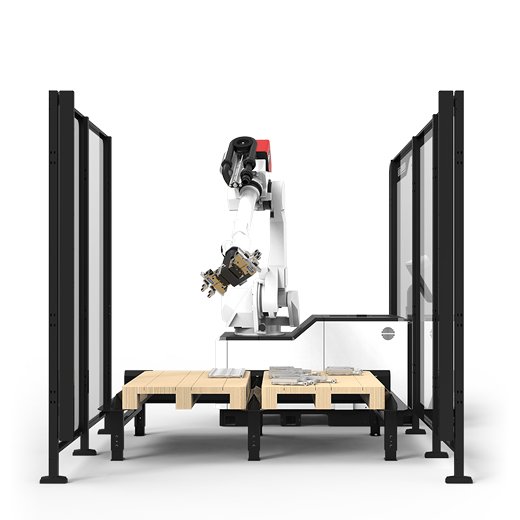
-
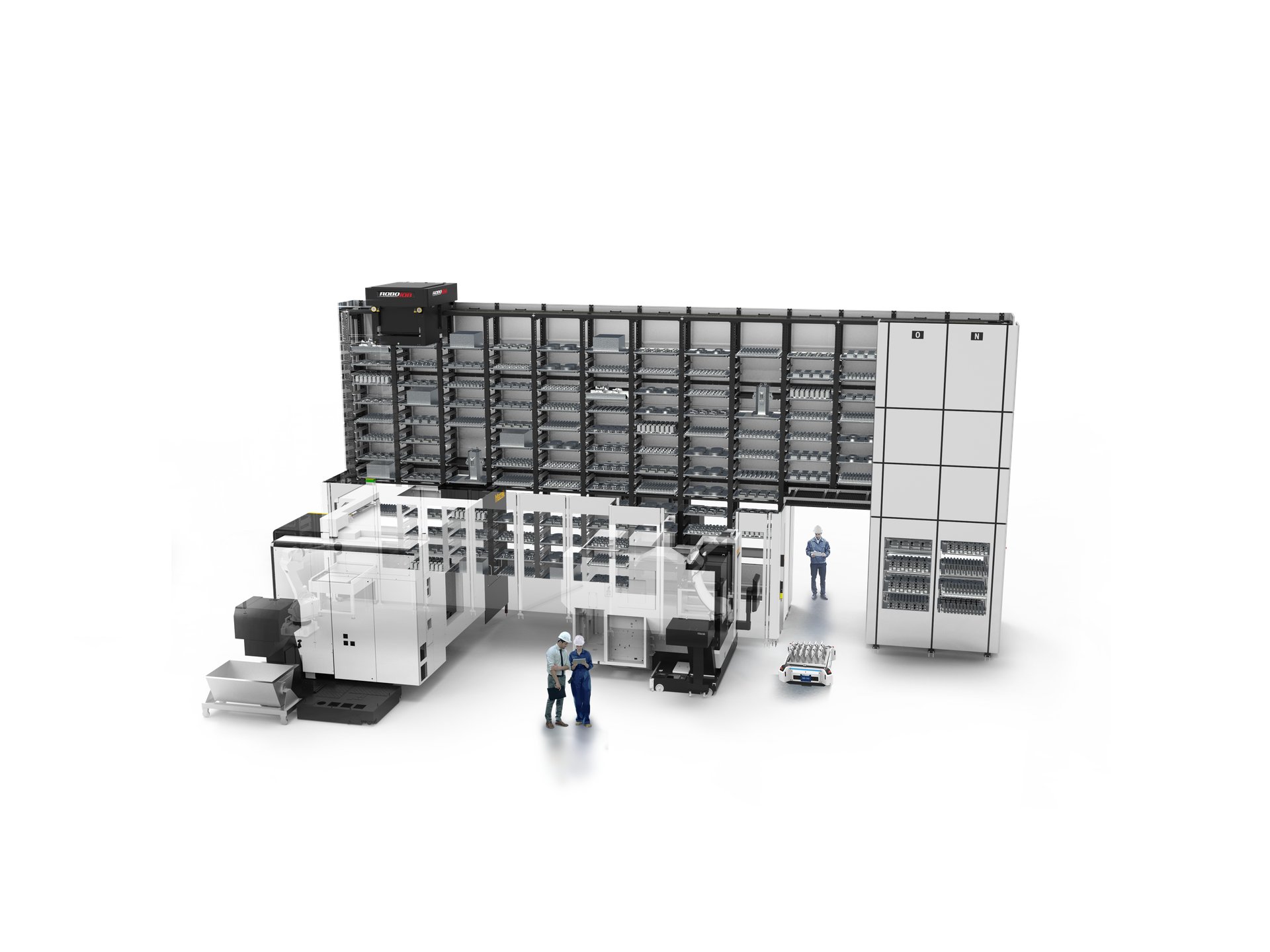
Wall
Een revolutionair modulair automatiseringssysteem dat het laden van CNC-machines vereenvoudigt met maximale ruimte-efficiëntie.
Marktleider in CNC-automatisering
Het is onze missie om elke CNC machine te automatiseren, of het nu een freesmachine, een draaibank of een combinatie van de twee is. In de afgelopen 18 jaar hebben we zes volwassen productreeksen ontwikkeld, waaronder de Turn-Assist en de Mill-Assist, maar u kent misschien ook onze Tower, Wall, Coby CNC of Pallet-Load. We automatiseerden meer dan 100 verschillende CNC-merken, dus u bent zeker niet de eerste die met RoboJob aan de slag gaat.
+2.000 Installaties
Dat zijn +2.000 beloften die we zijn nagekomen.
Ontdek het RoboJob-effect in onze succesverhalen.





+2.000 Installaties
Dat zijn +2.000 beloften die we zijn nagekomen.
Ontdek het RoboJob-effect in onze succesverhalen.
Ontmoet ons briljante team
Achter elk RoboJob-product, -innovatie en -installatie staat een team van gepassioneerde en getalenteerde mensen, die zich inzetten om slimmere automatiseringsoplossingen te creëren. Samen zetten we uitdagingen om in kansen, samen brengen we onze robots tot leven.